Walaupun masuk dalam kategori toy-grade dimana hanya berprosesor F0 dengan protokol Bayang, dan dasar untuk motor brushed ternyata FC Micro Drone alias Micin seperti E011, H8 Mini, dan H67/E011C bisa dikonversi agar bisa menggunakan motor brushless dan baterai diatas 1S.
Hal ini tidak terlepas dari kemampuan firmware Silverware sehingga FC Micin ini bisa terbang dengan menggunakan motor brushless.
Bagaimana proses konversi ini dilakukan? Yuk kita langsung saja simak caranya.
KOMPONEN
Sebelumnya ada beberapa komponen yang diperlukan dalam melakukan konversi, diantaranya adalah :
- FC Micro Drone E011 atau H8 Mini atau H67/E011C.
- ESC, baik ESC satuan maupun 4in1. Usahakan ESC yang digunakan mendukung protocol DSHOT 600.
- Motor Brushless. Ukuran disesuaikan dengan ESC dan Baterai yang digunakan (1S/2S/3S).
- Modul step-down 5v (untuk build dengan menggunakan batre 2S keatas).
- STLINK USB Programmer untuk flashing board dengan firmware silverware.
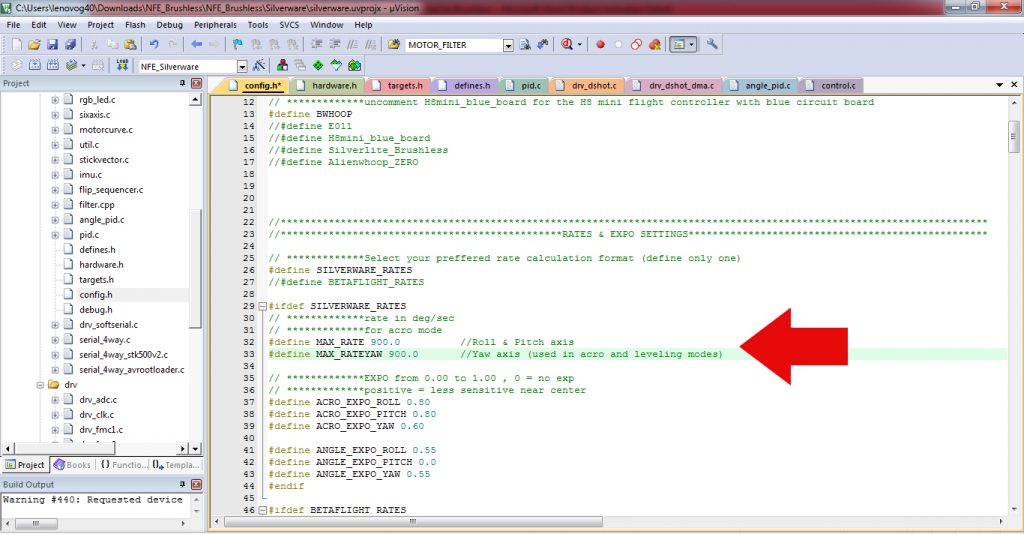
- Aplikasi Keil. Download disini.
- Firmware Silverware modifikasi NFE. Download disini.
Selebihnya adalah peralatan pendukung seperti solder, socket baterai, kabel-kabel, dan sebagainya.